
现代 ADAS 架构通信协议
发表时间:2024-07-11 11:35:03 来源:华体会登录
1915 年,福特汽车公司首次推出了汽车中的电子元件,当时福特汽车公司向其 T 型汽车引入了电灯和电喇叭。从那时起,汽车对电气和电子系统的依赖一直在稳步增加。初始系统往往是本地且独立的 – 控制直接连接到电池的前照灯的开关,或控制单个扬声器的继电器。
随着架构的演变,汽车内各种子系统进行通信的机制也在不断演变。例如,当汽车检测到车外环境光线减弱时,它可能会自动启用前照灯,但这并不是全部。它可能会调整所有显示屏的亮度水平,调整所有摄像头的白平衡,增加与前方车辆保持的距离,并更强调制动模块,从而打造更安全的驾驶体验。
随着无人驾驶汽车的持续不断的发展,通信的安全性和实时性也慢慢的变重要。这一挑战只因传输和接收的数据数量不再是数百千位/秒,而是几十千兆位/秒。
本文介绍了四种汽车通信协议:以太网、FPD-Link™ 技术 (专有汽车串行器/解串器 (SerDes) 协议)、CAN 总线和 PCIe 总线,突出了每种技术的核心细微差别,并提供了这些技术支持现代汽车驾驶员辅助系统 (ADAS) 架构的示例和功能,如图 1 所示。

以太网是家庭和办公室中常见的高速接口之一,并且正在成为车辆的主要通信协议。一些车辆使用以太网来传输各种高速数据;雷达和激光雷达模块等汽车应用使用单线对以太网技术。单线对以太网使用以太网标准,但数据通过单根双绞线进行传输,以此来降低了车辆中的电缆重量和成本。
以太网是一种封包化系统,在该系统中,网络各部分节点之间的数据包会传输信息。与 CAN 总线一样,以太网是双向的,并且任何单独链路上的速度都随着系统上的节点数量的增加而降低。对于单线对以太网,任何单独链路上的速度都限制为一个特定的速度(10Mbps、100Mbps、1Gbps),并且链路上不会发生动态速度变化。不过,单线对以太网能够最终靠链路传输数据,速度比 CAN 总线 倍。改为单线对以太网将优化 CAN 总线上的数据传输速度,但由于以太网每个节点的成本比较高,因此它可能不会取代(而是增加)CAN 总线。
如今,有些汽车使用单线对以太网来满足备用摄像头和雷达等数据密集型要求。例如,德州仪器(TI) 的 DP83TC812S-Q1
和 DP83TG720S-Q1 是单线对以太网物理层 (PHY),根据汽车电子委员会-Q100 1 级和 2 级进行筛选,并包含环回测试模式,有助于实现符合电气电子工程师协会 (IEEE) 802.3bw 和 802.3bp 汽车标准的系统诊断。要通过以太网传输视频,即使只有一个视频通道被传输,视频也必须在源端进行压缩,然后在目标端进行解压缩,避免超过以太网带宽限制,这与 FPD-Link™ 技术不同,该技术允许传输未压缩的视频数据。对于备用摄像头等应用,摄像头中需要有一个相比来说较高的功率处理器来充分压缩图像,使其进入以太网网络。
反过来,对大功率处理器的需求意味着摄像头的物理尺寸更大且更昂贵。与不需要大量图像处理的方法相比,摄像头的功率损耗更高。该解决方案的另一个缺点是视频压缩和解压缩会增加链路的延迟。如果多个摄像头或其他视频源共享同一个以太网网络,则需要在压缩量(和相应的视频质量)与支持的视频通道数量之间进行权衡。通过在汽车内以分层配置设置多个网络,能减轻这种限制。可能有一个网络只处理发动机控制和诊断,另一个网络处理后座娱乐系统和音频系统,还有一个网络处理驾驶员辅助功能,例如视觉增强摄像头。最后,单线对以太网提供比 CAN 总线更高的容量来传输雷达和激光雷达等数据,但代 价是复杂性更高,但仍然难以处理视频等高带宽应用。
FPD-Link 是专有的汽车串行器/解串器技术,专为实时无压缩传输高带宽数据而开发。具体而言,FPD-Link 是为在车内传输视频数据而开发的,从而在驾驶辅助应用中增强了数据分析和解决能力。例如,它可用于向显示屏发送未压缩的视频,而反向通道可将来自外置摄像头的信息发送到处理器,该处理器使用图像处理和算法将命令信号发送回汽车或驾驶员,例如用于自动制动。FPD-Link 的物理层是双绞线或同轴电缆。布线是专用的,因此在将 FPD-Link 用于备用摄像头时,一根电缆从摄像头连接到处理器,另一根电缆从处理器连接到座舱中的显示屏。在该应用中使用 FPD-Link 的主要优势是,摄像头和显示屏都可以是更简单的电路,因为不需要压缩和解压缩。
此外,由于链路是专用的,因此一个视频系统的图像质量与车辆中的其他元素无关。FPD-Link 具有 25Gpbs+ 的正向通道带宽和同步低速反向通道。反向通道可用于以 400kbps 的速率传输 I2C 总线Mbps 的速率控制 GPIO 线路。能够正常的使用反向通道配置摄像头、操作变焦镜头或将触摸屏信息发送回控制器,而不会中断正向通道上的视频流。对于自主驾驶车辆,另一个主要的因素是链路延迟量。压缩和解压缩图像所需的处理会增加此延迟。对于后座娱乐系统等应用,从 DVD 读取数据与其在屏幕上显示数据之间的延迟并不重要。但是,如果传输的图像来自在车辆路径中寻找行人的摄像头,则延迟可能会带来灾难性的后果。FPD-Link 很适合需要高带宽和低延迟的链路。此外,通过单根双绞线或同轴电缆连接支持反向通道和电源的功能可简化布线,并有助于降低总系统设计的复杂性。
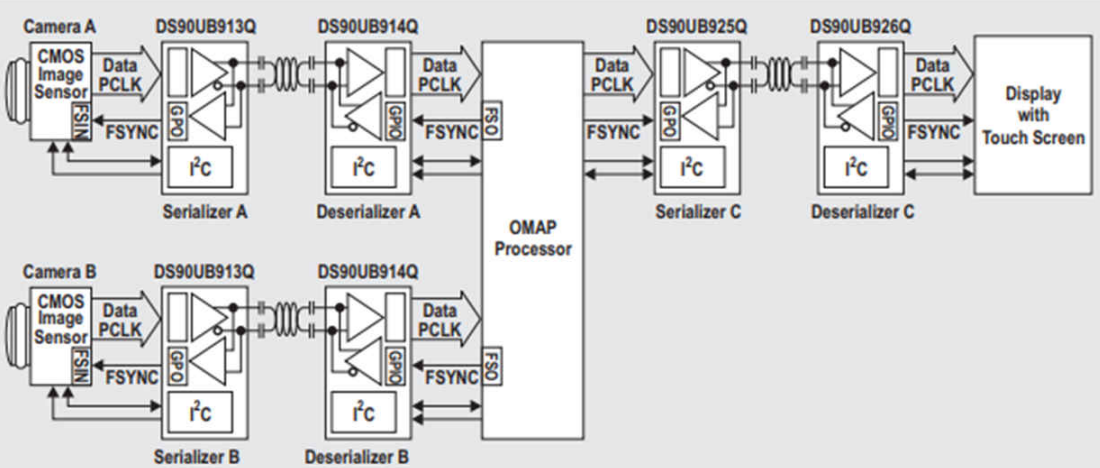
图 2 展示了一个连接到两个不同摄像头的 OMAP™ 视频处理器和一个带有一根连接到每个外设的双绞线电缆的显示屏。此双绞线电缆支持摄像头视频数据和触摸屏或摄像头设置数据。电缆还可以为显示器或摄像头供电。由于每个链路都专用于一个外设,因此消除了两个摄像头信号之间的干扰风险,来提升了处理和分析的数据完整性,使ADAS功能更可靠、更准确。从多个摄像头传输数据的能力对自动泊车等环视应用尤其有利,在这些应用中,车辆四周的 360 度全景可为驾驶员提供关键信息,以此来实现更安全的驾驶体验。观看什么是 FPD-Link?,了解有关 FPD-Link 基础的更多信息。
CAN 通信自 Robert Bosch GmbH 于 20 世纪 80 年代开发以来,已有了很大的发展。多点网络协议显著减少了车辆中所需的电缆布线,同时还实现了仲裁通信系统,该系统可将总线访问权限授予总线上的最高优先级节点。CAN 协议和物理层最初是在二十世纪九十年代初标准化的,数据速率高达 1Mbps。如今,CAN 通信已发展到高达 10Mbps 的速度,弥补了 20 世纪 90 年代经典 CAN 与 10Base-T 等低速汽车以太网之间的差距。
CAN 是一个多命令器串行总线;换句话说,当单个节点可以读取和写入 CAN 总线时,没有单个命令器节点来控制。每个报文帧都包含一个标识符,用于确定 CAN 报文的优先级。如果多个节点尝试同时发送到 CAN 总线,则具有最高优先级(或最低仲裁 ID)的节点将控制总线。CAN 通信在恶劣环境中是可靠的,它允许 ECU 仅与一对电线进行通信。
最初在 20 世纪 80 年代开发 CAN 时,车辆中的 ECU 数量 相对较少。如今,乘用车可以包含 100 多个 ECU,控制功能包括基本动力转向和豪华功能,如座椅按摩器和方向盘加热器。随着 ECU 的增加以及乘客车辆对更高级安全功能的需求,CAN 通信也在不断发展。
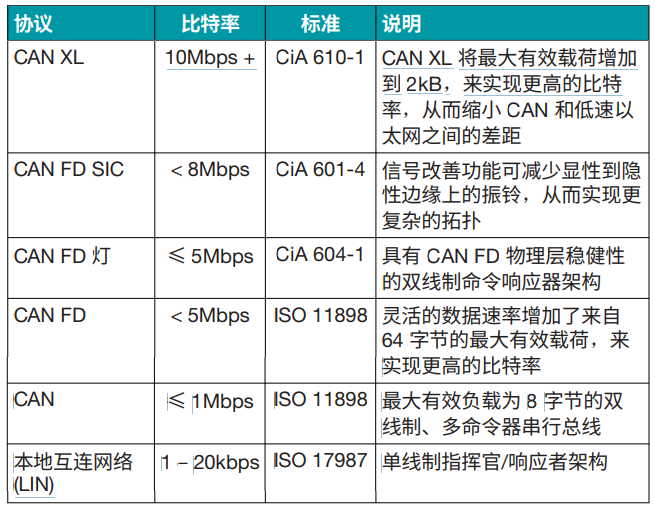
表 1 列出了有关 CAN 通信网络的更多信息,包括 CAN FD 灯、CAN 信号改善功能 (SIC) 和 CAN 超长 (XL) 等新标准。阅读控制器局域网 (CAN) 简介,了解更多有关 CAN 的 信息。
PCIe 是双向高速串行总线的通信标准,满足高带宽、超低延迟性能要求。PCIe 在工业应用中更为常用,随着制造商开始重新思考数据主干架构,从而支持高带宽和低延迟系统处理需要实时处理的传感器数据和用户个人信息呈指数级增长的情况,PCIe 现已在汽车应用中兴起。
为了解决这一难题,集中式计算节点支持多种不一样的域(ADAS、信息娱乐、动力总成)。这种集中式计算盒通常包含许多支持汽车不同功能的模块,使汽车制造商可以灵活地上下扩展和定制汽车功能,而不需要重新设计整个域控制器。由于 PCIe 支持一个根复合体或中央处理单元 (CPU) 连接到多个端点或接收器,因此采用 PCIe 进行集中式模块化设计可明显降低汽车所需的整体 ECU 和电缆数量。
当汽车行业开始在整个数据主干中要求协处理和冗余时,PCIe 慢慢的变着迷,因为许多 CPU 内置有原生 PCIe 接口,并且不需要在背板上进行额外的接口转换。PCIe 有一个拥有开放软件资源的巨大生态系统,并且凭借 可扩展性非常强的带宽,它的带宽连续一代增加了一倍。因此,PCIe 协议可能会跟上汽车数据处理指数增长所需的带宽。
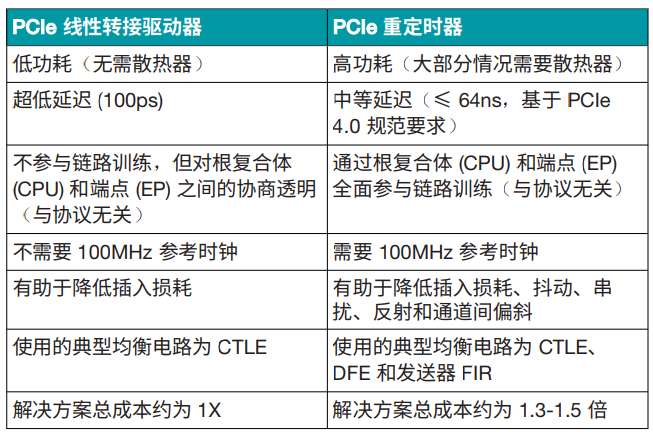
在设计高速数据信号路径时,信号衰减会成为一项巨大的挑战。在大多数情况下要转接驱动器或重定时器等信号调节器来恢复和补偿印刷电路板材料、过孔、连接器或电缆上的插入损耗和噪声。长期以来,转接驱动器和重定时器在 PCIe 生态系统中一直可靠,可提高通过 PCIe 协议传输数据时的整体信号完整性。表 2 列出了转接驱动器和重定时器之间的差异。观看视频解决 PCIe 信号完整性难题,仔细地了解构成 PCIe 信号路径的元件。
种接口更适合汽车通信?它们都适合,但每个都有自身的用途。当带宽要求上升时,例如雷达和 LIDAR 数据传输,以太网支持必要的带宽需求。当需要超高带宽和超低延迟的链路时,例如对于为无人驾驶车辆提供输入的环视摄像头系统,FPD-Link 就可以应对这一挑战。CAN 总线继续为低速度控制应用提供 ADAS 支持,对此类应用,成本是驱动因素,例如数据优先级划分、安全气囊部署等。PCIe 可满足移动持续不断的增加的需要实时处理的传感器数据和用户个人信息的需求。这四种关键的汽车通信协议共同构建了集成的互联车辆,可实时支持驾驶员安全并满足 ADAS 架构一直增长的要求。请访问传感器融合,仔细地了解我们先进的通信技术怎么样提高安全关键型驾驶辅助应用的可靠性。
- 上一篇: 大众POLO Can-Bus总线技术简单讲解
- 下一篇: 多功能车辆总线之MVB协议
